티스토리 뷰
SPI란?
SPI(Serial Peripheral Interface)
: Motorola에 의해 개발된 full-duplex 통신 이 가능한 동기 통신 규격
⦁ Master-Slave 방식으로 동작하며 하나의 Master와 하나 이상의 Slave가 연결되는 구조
⦁ Master에 의해 클럭이 출력되며 클럭에 의해 동기화된 직렬 통신 방식
⦁ 4개의 신호로 구성(SCLK, MOSI, MISO, NSS)
∘ SCLK : Master에서 출력하는 Slave와 동기화하기 위한 클럭 핀
∘ MOSI : Master Output Slave Input. Master에서는 출력, Slave에서는 입력으로 사용하는 핀
∘ MISO : Master Input Slave Output. Master에서는 입력, Slave에서는 출력으로 사용하는 핀
∘ NSS : Master에서 통신할 하나의 Slave를 선택하는 핀
STM32L0 SPI 통신의 특징
Master 또는 Slave 모드로 동작
Full-duplex / Half-duplex / Simple synchronous 전송 가능
8-bit / 16-bit transfer frame format 선택
MSB-First 또는 LSB-First shifting으로 Data 전송 순서 설정 가능
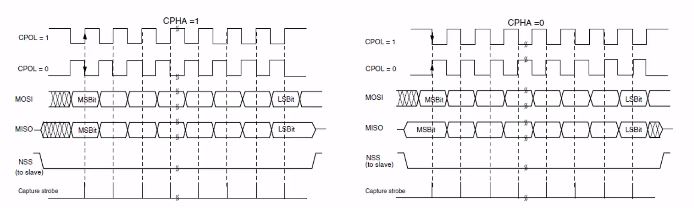
Clock Polarity와 Phase 설정 가능
- CPOL(Clock Polarity)
- CPOL - 0 : Idle 상태에서 clock의 극성이 LOW
- CPOL - 1 : Idle 상태에서 clock의 극성이 HIGH
- CPHA(Clock Phase)
- CPHA - 0 : clock의 첫번째 edge에서 전송된 첫번째 data를 capture
- CPHA - 1 : clock의 두번째 edge에서 전송된 첫번째 data를 capture
- SPI 채널 세팅
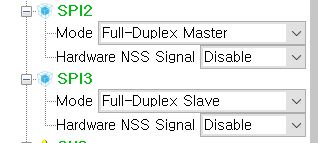
- SPI2 채널과 SPI3 채널 사이의 통신 구현
- SPI2의 모드를 전이중 통신이 가능한 Full-Duplex Master로 세팅
- SPI3의 모드를 전이중 통신이 가능한 Full-Duplex Slave로 세팅
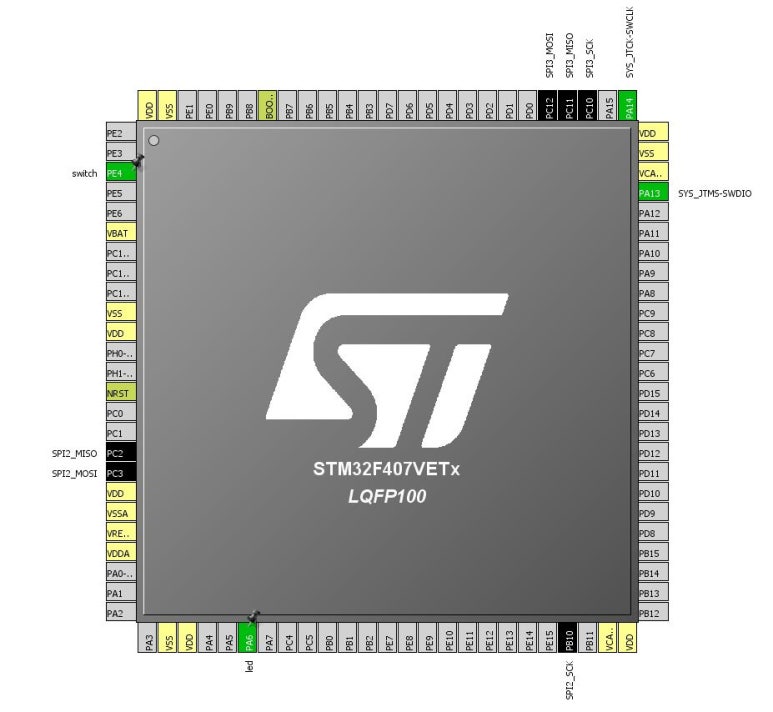
- SPI 채널 세팅 결과 설정된 핀
- SPI2
- SPI2_MISO : PC2
- SPI2_MOSI : PC3
- SPI2_SCLK : PB10
- SPI3
- SPI3_MISO : PC11
- SPI3_MOSI : PC12
- SPI3_SCLK : PC10
SPI Configuration
Configuration 탭에서 SPI2, SPI3에 대한 Configuration하기
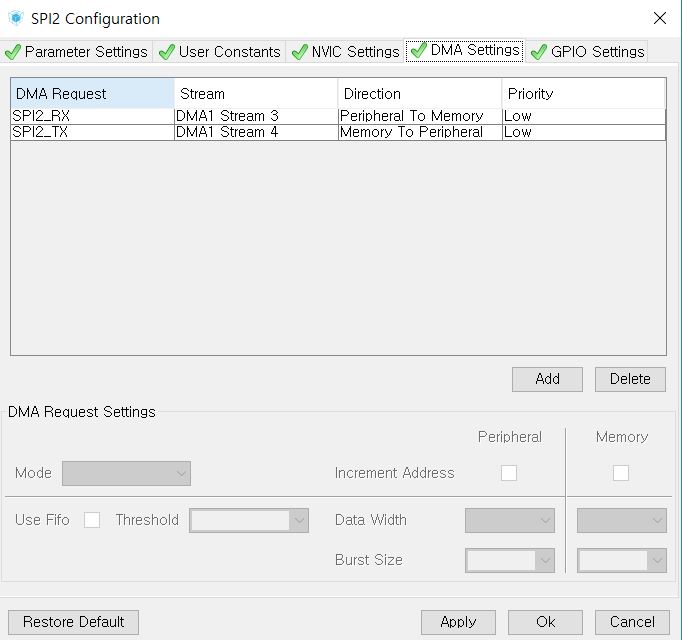
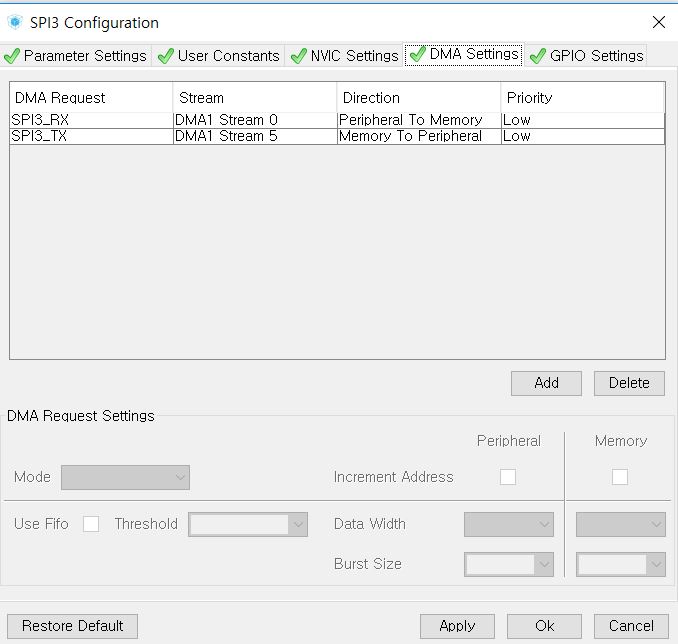
SPI2, SPI3 Configuration
DMA Settings 탭에서 Add 버튼 클릭하여 각각 RX, TX 핀 DMA_REQUEST에 추가
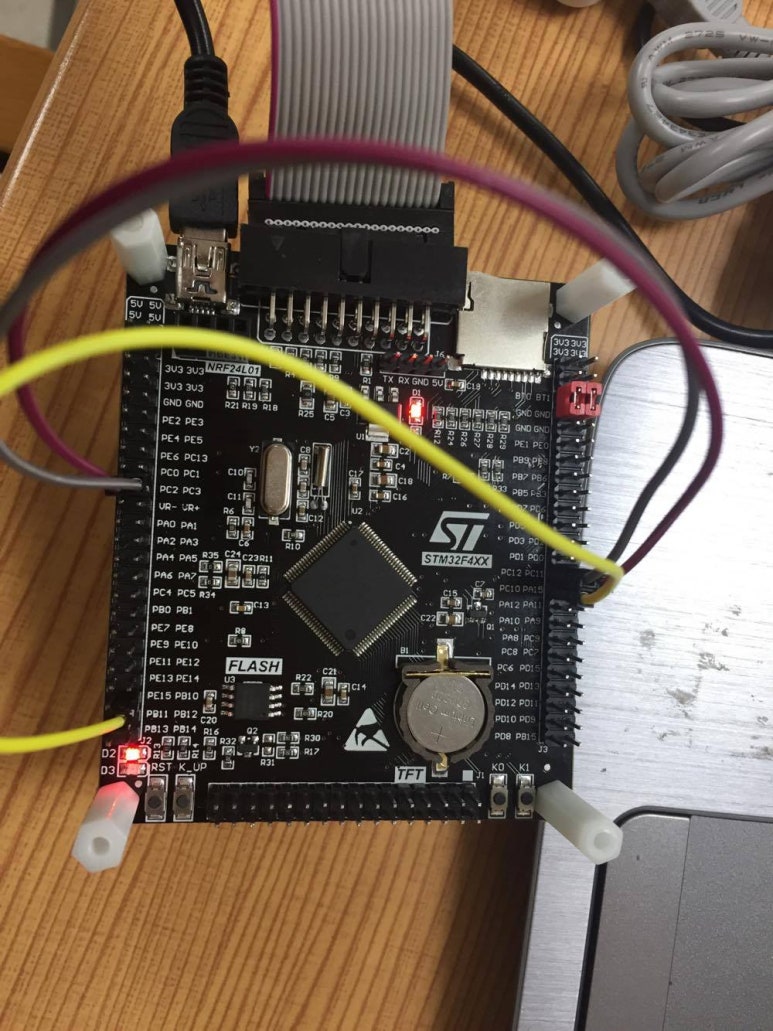
Hardware 설정
SPI2와 SPI3의 각각의 MOSI, MISO, SCLK 핀을 서로 연결해준다.
PC2(SPI2_MISO) - PC11(SPI3_MISO)
PC3(SPI2_MOSI) - PC12(SPI3_MOSI)
PB10(SPI2_SCLK) - PC10(SPI3_SCLK)
Code
Master와 Slave에서 전송할 데이터인 Tx Buffer
/* Master, Slave Tx Buffer*/ uint8_t master_buffer_tx[] = "STM32F4 SPI Master Tx"; uint8_t slave_buffer_tx[] = "STM32F4 SPI Slave Tx";
Tx Buffer의 Size
#define COUNTOF(__BUFFER__) (sizeof(__BUFFER__) / sizeof(*(__BUFFER__))) #define SLAVE_TX_SIZE (COUNTOF(slave_buffer_tx)) #define MASTER_TX_SIZE (COUNTOF(master_buffer_tx))
Master와 Slave에서 수신할 데이터인 Rx Buffer
/* Master, Slave Rx Buffer*/ uint8_t master_buffer_rx[SLAVE_TX_SIZE]; uint8_t slave_buffer_rx[MASTER_TX_SIZE];
시작을 위한 시작 버튼(PE4) 폴링 체크
/* Wait for the button event*/ while(HAL_GPIO_ReadPin(GPIOE, GPIO_PIN_4) != GPIO_PIN_RESET);
Master에서 Transmit, Slave에서 Receive하기
/* Receive the data from SPI2-Master*/ if(HAL_SPI_Receive_DMA(&hspi3, (uint8_t*)slave_buffer_rx, MASTER_TX_SIZE) != HAL_OK) { /* Error Handler*/ } /* Send the data to SPI3-Slave*/ if(HAL_SPI_Transmit_DMA(&hspi2, (uint8_t*)master_buffer_tx, MASTER_TX_SIZE) != HAL_OK) { /* Error Handler*/ }
데이터 송수신이 완료되었는지 확인
/* Check the SPI tx, rx state*/ while(HAL_SPI_GetState(&hspi3) != HAL_SPI_STATE_READY); while(HAL_SPI_GetState(&hspi2) != HAL_SPI_STATE_READY);
Slave에서 Transmit, Master에서 Receive하기
/* Send the data to SPI2-master*/ if(HAL_SPI_Transmit_DMA(&hspi3, (uint8_t*)slave_buffer_tx, SLAVE_TX_SIZE) != HAL_OK) { /* Error Handler*/ } /* Receive the data to SPI3-slave*/ if(HAL_SPI_Receive_DMA(&hspi2, (uint8_t*)master_buffer_rx, SLAVE_TX_SIZE) != HAL_OK) { /* Error Handler*/ }
데이터 송수신이 완료되었는지 확인
/* Check the SPI tx, rx state*/ while(HAL_SPI_GetState(&hspi3) != HAL_SPI_STATE_READY); while(HAL_SPI_GetState(&hspi2) != HAL_SPI_STATE_READY);
데이터 송수신 후 LED(PA6) Toggle
/* Infinite loop*/ /* USER CODE BEGIN WHILE*/ while(1) { /* USER CODE END WHILE*/ /* USER CODE BEGIN 3*/ /* verify the transmission completion using LED*/ HAL_GPIO_TogglePin(GPIOA, GPIO_PIN_6); HAL_Delay(500); } /* USER CODE END 3*/
'STM32 > SPI' 카테고리의 다른 글
| STM32CubeMX UART로 Hello World! 출력하기 (1) | 2018.05.08 |
|---|
- Total
- Today
- Yesterday
- STM32
- 컴퓨터구조
- PID
- computer_science
- 로그
- 초기화 리스트
- DCM
- 드론개발
- 칼만필터
- teraterm
- compile
- UART
- 드론
- 오실로스코프
- pwm
- 고도필터
- SPI
- DMA
- Effective C++
- 컴파일
- 멤버 초기화 리스트
- 터미널
- c
- C++
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | |
| 7 | 8 | 9 | 10 | 11 | 12 | 13 |
| 14 | 15 | 16 | 17 | 18 | 19 | 20 |
| 21 | 22 | 23 | 24 | 25 | 26 | 27 |
| 28 | 29 | 30 |